|
|
商品の詳細:
|
| 重量: | 633g | ||
|---|---|---|---|
| ハイライト: | 高い可制御性の柔らかいロボティック グリッパー,3600g負荷柔らかいロボティック グリッパー,移動可能なやし柔らかいロボット グリッパー |
||
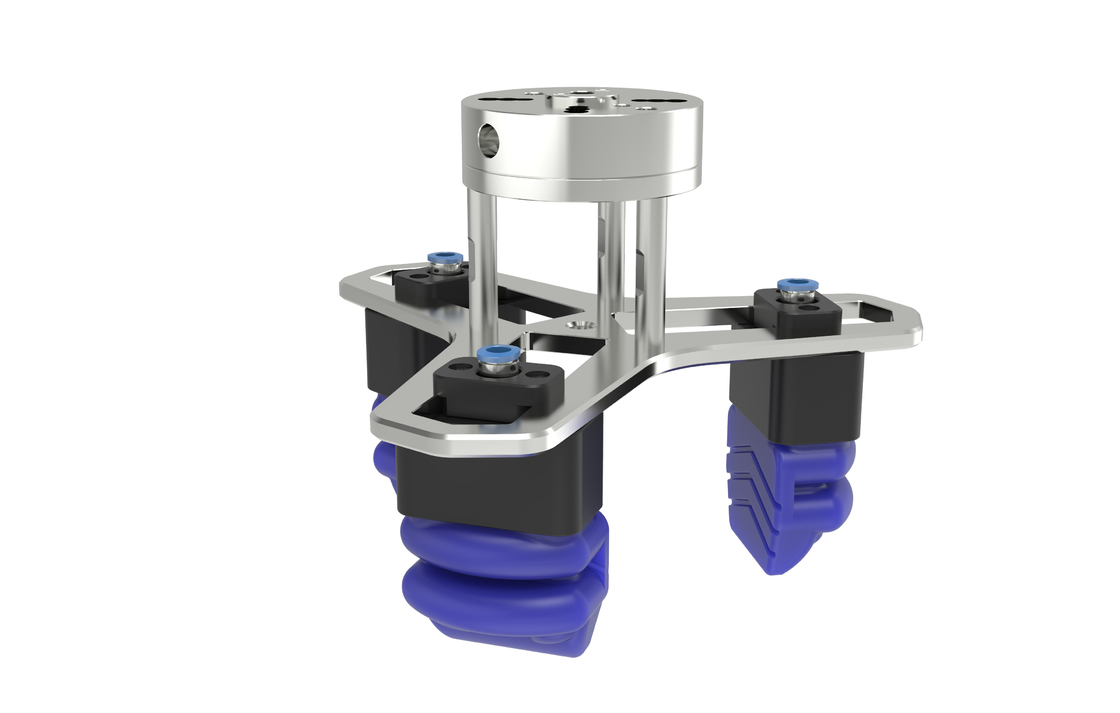
SFG-FNC3-N5041 +可制御性+柔らかいロボット グリッパー
異なった形およびサイズのたくさんの目的をつかむことができる柔らかいロボット グリッパー
柔らかいロボット指の設計のハイライトは移動可能なやしである(少数の研究者は移動可能であるようにグリッパーのやしを設計した)。ペーパーでは、研究者は移動可能なやしによって、柔らかいロボット指が異なった形およびサイズのそして3つのkgの最高重量までのたくさんの目的をつかむことができることを示すオープン・ループ魅惑的な制御だけを使用して。その上、適用範囲が広いグリッパーに落ちないでしっかりと握られて残っていて目的が優秀で魅惑的な安定性が、あるロボティック腕が15m/s^2.の加速で動くとき。
| φb | 200 |
| Wn | 50 |
| Dn | 28-134 |
| Lb | 68.2 |
| Lt | 62.7 |
| Ln | 66 |
| L | 40.5 |
| Smax | 12 |
| Ymax | 17 |
| 工作物次元の範囲 | 28-158 |
| 負荷(g) | 3600 |
| プロダクト重量(g) | 633 |
| 最大吸入圧 | 100kPa |
| プロダクト生命 | 300w |
![]()
コンタクトパーソン: Miss. wang
電話番号: +8618651125686