
|
商品の詳細:
|
| ハイライト: | 外国のパテントの柔らかいロボティック指,国内パテントの柔らかいロボティック指,セリウムのロボティック指 |
||
|---|---|---|---|
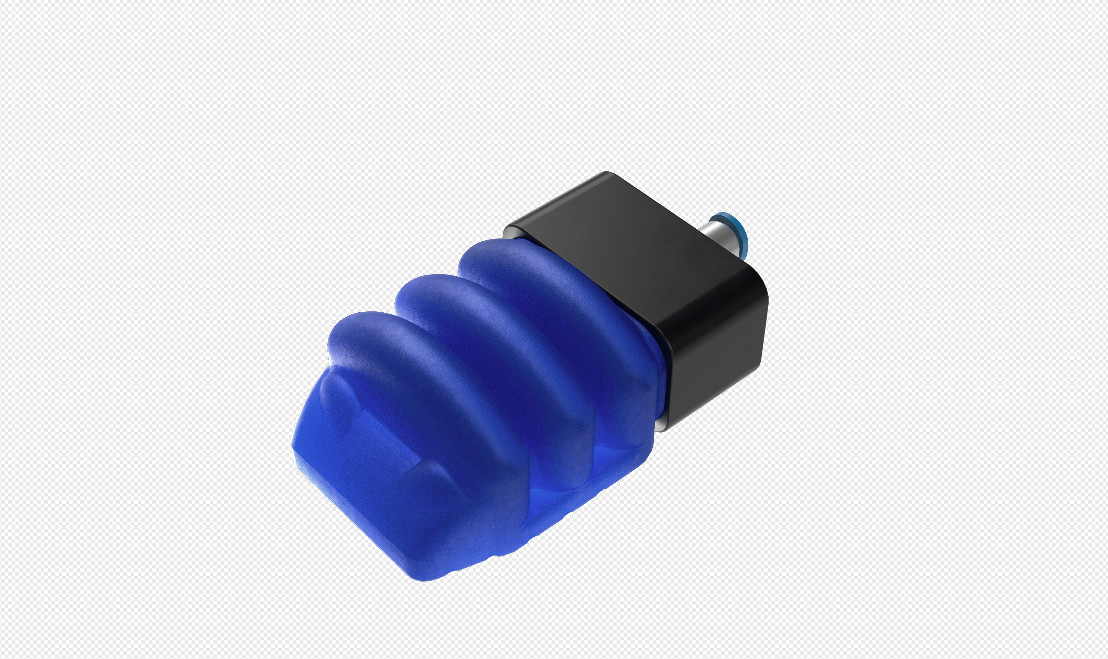
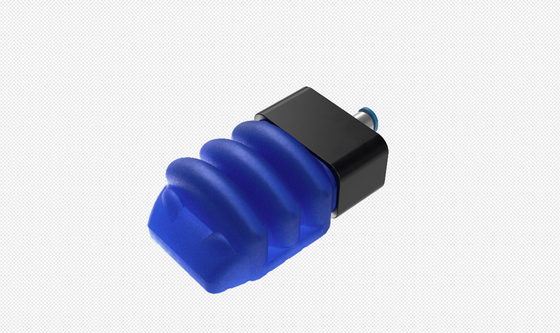
N5056 +国内および外国のパテント+柔らかいロボット指
適用範囲が広く魅惑的な技術を破壊する柔らかいロボット指
産業オートメーションの市場は重い、簡単な肉体労働ポイントに証明された解決によって解決した展開した。挑戦は複数の部門の、定形および壊れやすい項目の自動化された生産に肉体労働の機械取り替えのために今焦点を合わせる去った。適用範囲が広い締め金で止める据え付け品の欠乏によって限られた、これらの項目は荷を積まれ、手動で荷を下すただことができ製造業者の生産能力を非常に限り、費用を増加する。
実際、これは全体的な企業の共通の問題であり、にまたは外国に長い間成長した解決が中国ずっとない。これらの必要性に応じて、SRTは定形および壊れやすい項目の自動化されたローディングそして荷を下す業界全体問題を解決するために適用範囲が広いロボット指を発達させ適用範囲が広いグリッパーを発達させ、作り出す中国の最初の会社に似合った。
| W/mm | 50 | |
| L/mm | 56 | |
| Ln/mm | 81.5 | |
| T/mm | 33.5 | |
| X/mm | 1.5 | |
| A/mm | 48 | |
| B/mm | 27 | |
| Smax/mm | 20 | |
| Ymax/mm | 31 | |
| weight/g | 121.2 | |
| 指先thrust/N | 17 | |
| 個々のfinger/gの負荷係数 | 垂直 | 670 |
| パック | 1300 | |
| 働く速度/cpm | <110> | |
| プロダクト生命/一続き | >300W | |
| 働き圧力 | -60~100kPa | |
| 関係の直径 | 6mm | |
![]()
コンタクトパーソン: Miss. wang
電話番号: +8618651125686